AMME 2500 Lab 1
Manaal Fatima
309185696
The Behaviour Of A Simple Gyroscopic System And Its Moment Of Inertia
Introduction
A gyroscope is a device that maintains orientation, based on the principles of conservation
of angular momentum. It consists of a spinning mass, called a flywheel that is mounted on a
base at its pivotal point. The flywheel is free to move in any direction, and because of this, it
is able to maintain orientation regardless of any movement in the base. The motion of a
gyroscope involves three types:
1. Axial spin, which is the rotation of the flywheel about the spin axis positioned through its
centre, denoted by ωs in this experiment.
2. Precession, which is the rotation of the entire gyroscope about the axis positioned
through its pivotal point, denoted by ωp.
3. Nutation, which is a slight irregular motion in the axis of rotation, denoted by ωn.
Gyroscopes are used in a range of applications, from navigation systems in cars, planes and
even rockets to computer pointing devices that allow control of the mouse cursor while the
pointer is in the air. They are used in the production of racing cars and motor bikes to
maintain engine orientation and balance, as well as being used as stabilisers in ships and
some monorails to keep the body upright. Basically a gyroscope’s properties make it ideal
for use in the navigation and maintaining orientation of a body.
Aim
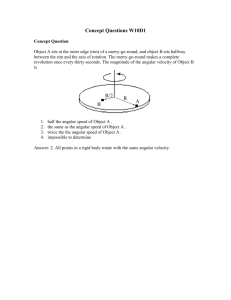
1. To observe the behaviour of a simple gyroscopic system involving a rotating flywheel
balanced upon a pivot, and how its behaviour is affected by the movement of the pivotal
point away from the centre of mass.
2. To calculate the moment of inertia of the gyroscope about the z-axis.
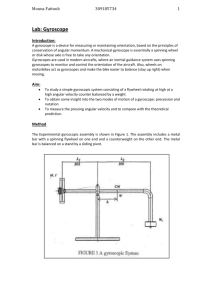
Method
Part A- Measuring the decay of angular velocity of the flywheel
1. Revved up the angular velocity of the flywheel using the power drill to 3000 rpm.
2. Measured the angular velocity at regular intervals for up to two minutes. Recorded
results in a table.
1
AMME 2500 Lab 1
Manaal Fatima
309185696
Part B- Marking out distances from mass centre
1. Found centre of mass of gyroscope and marked its position.
2. Marked out distances, L, at 10 mm intervals to both the positive and negative side of the
x-axis of the gyroscope as assumed in Figure 1 (i.e. L = ±10 mm, ±20 mm, ±30 mm, ±40 mm,
±50 mm).
Figure 1. Assumed axes of gyroscope
Part C- Recording precession of gyroscope
1. Moved the pivotal point to the +10 mm mark away from the centre of mass.
2. Revved up the angular velocity of the flywheel to 3000 rpm.
3. Balanced the pivotal point on the base and measured the precessional revolution of the
system, recording the time taken for the gyroscope to complete half, then a full revolution.
4. Repeated these steps for all values of L.
RESULTS
Based on the assumed axis in Figure 1 and taking clockwise as positive, the rotation of the
flywheel was observed to be in the positive x-direction. The precessional rotation of the
gyroscope was found to change directions based on the different values of L, that is, for the
positive Ls it was found to be in the negative y-direction and for the negative values of L it
was in the positive y-direction.
The raw data obtained from the measurements is summarised in the tables on the next
page.
2
AMME 2500 Lab 1
Manaal Fatima
309185696
Figure 2. Decay of angular velocity of flywheel
Time (seconds)
0
10
30
50
70
90
110
ωs (rpm)
3000
2950
2800
2500
2400
2200
2100
Figure 3. Moving pivotal point away from centre of mass along the positive x-axis
Length from centre
of gravity (mm)
0
+10
+20
+30
+40
+50
Time (sec) for 0.5 rev
Trial 1
Trial 2
No spin
No spin
11.74
11.38
5.96
5.97
3.95
3.84
2.42
2.76
2.28
2.29
Time (sec) for 1 rev
Trial 1
Trial 2
No spin
No spin
23.51
23.17
12.01
12.12
8.47
8.07
5.79
5.93
4.98
4.86
Figure 4. Moving pivotal point away from centre of mass along the negative x-axis
Length from centre
of gravity (mm)
0
-10
-20
-30
-40
-50
Time (sec) for 0.5 rev
Trial 1
Trial 2
No spin
No spin
12.91
13.02
5.84
6.24
3.75
4.46
2.98
3.01
2.75
2.28
Time (sec) for 1 rev
Trial 1
Trial 2
No spin
No spin
26.16
26.20
12.35
12.53
8.13
8.94
6.28
6.25
5.17
4.99
Figure 5. Average of results used in final calculations
L (mm)
0
±10
±20
±30
±40
±50
Time (s) for one rev
No spin
24.525
12.005
8.4025
6.0625
5.0000
ωp (angular velocity in rpm)
No spin
2.446
4.998
7.141
9.897
12.000
ωp (angular velocity in rad/s)
No spin
0.256
0.523
0.748
1.036
1.257
3
AMME 2500 Lab 1
Manaal Fatima
309185696
DISCUSSION
The experimental moment of inertia about the z-axis was calculated for each distance from
the mass centre using the following formula:
𝐼𝑧𝑧 =
where
𝑊𝐿
𝜔𝑝 𝜔𝑠
W = 2.5 x 9.81 = 25N (weight of gyroscope)
L = distance from mass centre (in mm)
ωp = angular velocity of gyroscope in radians per second
ωs = angular velocity of flywheel, taken as 314 rad/s (which equals 3000 rpm)
An error analysis was also conducted for each of the experimental values of inertia using:
𝐸𝑟𝑟𝑜𝑟 (%) =
where
𝐼𝑧𝑧𝑡ℎ − 𝐼𝑧𝑧𝑒𝑥𝑝
× 100
𝐼𝑧𝑧𝑡ℎ
Izzth = theoretical moment of inertia, taken as 3.85E-03 (from notes provided)
Izzexp = experimental moment of inertia
The calculations were then recorded in Figure 6.
Figure 6. Experimental moments of inertia and their respective errors
L (mm)
Izzexp
0
N/A
±10
3.11E-03
±20
3.04E-03
±30
3.19E-03
±40
3.07E-03
±50
3.17E-03
Average error for experiment
Error (%)
N/A
19.28
20.98
17.03
20.19
17.72
19.04%
Based on the results obtained, the experimental value of inertia calculated for all values of L
was on average 19.04% lower than the provided theoretical value of 3.85E-03. The
maximum error found in the experiment was at L = ±20 mm, whereby Izzexp was calculated
to be 20.98% lower than Izzth.
4
AMME 2500 Lab 1
Manaal Fatima
309185696
The experimental errors are a result of several factors. The first would be the decay in the
angular velocity of the flywheel. As Figure 2 shows, the angular velocity drops by 900 rpm
over a period of about 2 minutes. Noting that 3000 rpm converts to an angular velocity (ωs)
of about 314 rad/s while 2100 rpm converts to 220 rad/s, the Izzexp will therefore be lower
than Izzth due to a higher ωs used in the calculations.
To minimise this effect, the method involved measuring the time taken for the gyroscope to
complete half a revolution, and the time was then multiplied by two to calculate the time
taken to complete a full revolution, thus ensuring that the angular velocity of the flywheel
was as close to 3000 rpm as possible. Although the time taken to complete a full revolution
was measured in the experiment for comparison purposes, the time used in the calculations
was based on that measured for half a revolution.
Theoretically it was expected that the time taken for a revolution be the same regardless of
whether the pivotal point was moved away from the centre of mass along the positive or
negative x-axis (i.e. time taken for L = +10 mm should equal the time taken for L = -10 mm).
This however was not the case, and it was found that the time taken along the negative xaxis was slightly higher than along the positive. To account for this difference, readings were
taken along both the positive and negative x-axis and the experiment was conducted twice
(Trial 1 and Trial 2) before the results were averaged and summarised in Figure 5. It is also
worth noting that the purpose of repeating the experiment was to ensure consistency of the
data, and help to minimise experimental or calculation errors.
Naturally, human errors would significantly affect the results of the experiment. There
would be an inaccuracy in determining when half or a full precessional revolution had been
completed by the gyroscope, and the recording of this time using a stopwatch would have
further been affected by human reaction time, which is about 0.2 to 0.25 seconds1.
Measurement errors in marking out the distances from the centre of mass may also be a
factor, as will the placing of the pivotal point along these marked lines. The way in which the
gyroscope was handled will also affect the results, it was found that the angle at which it
was placed on the pivot after revving up the flywheel was not always straight, and the
gyroscope would attempt to rotate before the person handling it had enough time to move
their hands away from the system, resulting in an interference that caused an initial
“wobble”.
As the pivotal point was moved further away from the mass centre, it was found that there
was a slight tilt in the gyroscope. The tilting then results in a decrease in moment of the
system, as the weight is now acting along a shorter distance away from the centre of mass
than the assigned value for L (see Figure 7 on the next page). A decrease in moment results
in a decrease in the angular velocity of the gyroscope, thus contributing to the error in the
calculation of Izzexp.
1
http://hypertextbook.com/facts/2006/reactiontime.shtml
5
AMME 2500 Lab 1
Manaal Fatima
309185696
new length
centre of mass
L
Figure 7. Tilt in gyroscope
W
We should also make note of certain assumptions that were made for the purpose of the
experiment, which were not necessarily true. First of all, the pivot was assumed frictionless,
which if true, would have resulted in a higher ωp than calculated. Secondly, ωn was
assumed to be zero, when it was observed that there was in fact a slight notation (this was
the “wobble” that was mentioned earlier). Also, the Izzth, although provided, would have
been calculated based on other experimental results and measurements, thus having the
potential to carry some error. Moreover, ωs was assumed to be constant, which was not the
case as discussed previously regarding the decay in angular velocity of the flywheel.
Taking all these factors into consideration while conducting the experiment and involving
the otherwise ignored aspects (such as the decay of ωs) in the calculations would have
resulted in a more accurate value for Izzexp. The results however proved to be consistent,
and an error analysis showed that Izzexp was only about 19% lower than Izzth, which suggests
that the results concurred with the theory.
CONCLUSION
The experiment involved observing the behaviour of a gyroscopic system, in which the
precessional rotation of the gyroscope was measured to calculate its moment of inertia
about the z-axis. Notational motion was also observed, although disregarded in the
calculation of the results. A comparison of the calculated moment of inertia was made with
the theoretical value, and it was found that the experiment results were on average 19.04%
lower than the theoretical value. The discrepancy between these two values was accounted
for by various sources of error, and methods of minimising them were identified and
discussed.
REFERENCES
http://www.gyroscopes.org/uses.asp
http://en.wikipedia.org/wiki/Gyroscope
http://science.howstuffworks.com/gyroscope3.htm
http://hypertextbook.com/facts/2006/reactiontime.shtml
6
 0
0