EEE342L
Lab 3
Pole Zero Stability [Continued], Stability Analysis using System Response
Pole-Zero Stability [Continued]
We already learned that poles can affect stability of a system. Some key pointers to note are:
→ To determine system stability, we have to analyze the system step response.
→ It is called stable when the response is bounded within two finite values.
Stable
𝑡 → ∞, 𝑓 → 0
Unstable 𝑡 → ∞, 𝑓 → ∞
Marginally Stable
𝑡 → ∞, 𝑓 𝑑𝑜𝑒𝑠 𝑛𝑜𝑡 𝑡𝑒𝑛𝑑 𝑡𝑜 ∞ 𝑜𝑟 0
The zeros of a transfer function do not affect the system stability. However, they do affect the
amplitudes / peak values of the system response and can cause overshoots.
In a stable system, if the poles are furhter away from the imaginary axis, then the system will decay
(dampen) more rapidly.
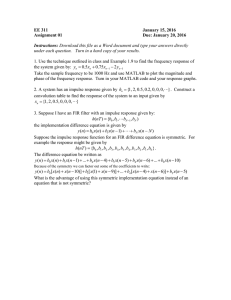
Representing a Feedback System
Let’s take a closed loop feedback system and assign some variables to the signals and systems:
Input
Actuator
Controller
Σ
Plant
Output
Sensor
U(s)
H(s)
D(s)
Σ
G(s)
Y(s)
F(s)
%MATLAB Code
Let’s assume a system with the following
equations:
1
𝐺(𝑠) =
𝑠+3
𝐻(𝑠) =
s = tf('s');
G = tf([1],[1 3]);
H = 1/(s-5);
D = 2*s;
F = 4;
1
𝑠−5
𝐷(𝑠) = 2𝑠
T = feedback(G*H*D, F)
𝐹(𝑠) = 4
𝑇𝑟𝑎𝑛𝑠𝑓𝑒𝑟 𝐹𝑢𝑛𝑐𝑡𝑖𝑜𝑛 𝑇(𝑠) =
U(s)
𝑌(𝑠)
𝐺𝐻𝐷
=
𝑈(𝑠) 1 + 𝐺𝐻𝐷𝐹
Σ
D(s)
H(s)
G(s)
Figure: Unity Feedback System
Y(s)
System Responses
We’ll mainly focus on three types of input response: Step, Impulse, and Ramp
Let’s consider our previous transfer function T(s). If we simply consider this transfer function as an open
loop system, we can redraw the system as:
In
T(s)
Out
𝑂𝑢𝑡 = 𝑌(𝑠)
𝐼𝑛 = 𝑈(𝑠)
So, the equation will be like:
𝑌(𝑠) = 𝑇(𝑠) 𝑈(𝑠)
The step responses in the s-domain are given below:
𝑈(𝑠) = 1 → Impulse
1
𝑈(𝑠) = 𝑠 → Step
1
𝑈(𝑠) = 𝑠2 → Ramp
Normally, when we are solving this by hand, we would
multiply the input responses U(s) with T(s) to get Y(s).
Then, we would use Inverse Laplace to get the solution of
y(t) after which, we would draw a graph based on the
solution.
MATLAB solves these tedious long calculations with the use
of some functions. We can simply write:
step(T)
impulse(T)
To get the step and impulse responses respectively.
However, we do not have a function like ramp(). Instead, we
use this cool trick:
step(T/s) %To get Ramp Response
% After Defining G,H,D,F
T = feedback(G*H*D, F);
% Step Response
figure(1)
step(T)
% Ramp Response
figure(2)
step(T/s)
% Impulse Response
figure(3)
impulse(T)
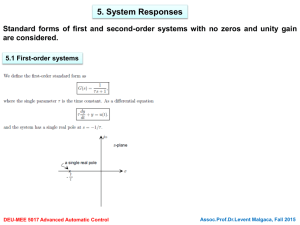
Analyzing Stability of Different System
Sample problem
Consider an Cruise Control system with the given plant G(s) and controller D(s). A second designer has
also proposed an alternate plant equation called Gnew(s). Consider a Unity Feedback System i.e. F(s) = 1.
U(s)
D(s)
Σ
G(s)
Y(s)
F(s)
𝑃𝑙𝑎𝑛𝑡:
𝐺(𝑠) =
5(𝑠 + 1)(𝑠 + 2)
(𝑠 2 + 0.1)(𝑠 2 + 5𝑠 + 40)
𝐺(𝑠) =
5𝑠 2 + 15𝑠 + 10
𝑠 4 + 5𝑠 3 + 40.1𝑠 2 + 0.5𝑠 + 4
𝐶𝑜𝑛𝑡𝑟𝑜𝑙𝑙𝑒𝑟:
𝑠+5
𝐷(𝑠) =
5
𝐺𝑛𝑒𝑤 =
1
(𝑠 + 3)(𝑠 + 4)
(a) Write the code to find the transfer function from Y to U.
(b) Write the code to find the transfer function for new G from Y to U.
(c) Write the code to plot the step, ramp and impulse response for new system.
(d) Analyze the step response of the old system and new system by plotting their step responses on the
same figure.
Homework
All problems (except problem 1) below are given from the textbook: Modern Control Systems 14th
edition by Richard C. Dorf, Robert H. Bishop.
CP means Computer Problems. You can find them in the end of chapter problems.
1. CP 2.8
2. CP 2.9 (a), (b)
3. Consider the following four transfer functions:
T₁(s) = 10 / (s² + 6s + 10)
T₂(s) = (s + 4) / (s² + 2s + 16)
T₃(s) = 50 / (s² + s + 50)
T₄(s) = 36 / (s² + 36)
Write MATLAB code to define these transfer functions and plot their unit step responses on the
same figure.
From the plots, determine which system is:
- Critically damped
- Moderately stable
- Very low stability
- Marginally stable
25
4. Let’s take a transfer function 𝑇(𝑠) = 𝑠2 + 𝑘𝑠 + 25 where k is a constant which you will control. Find
the step responses, using MATLAB, for the following values of k.
𝑘 = 0, 5, 10, 15
Discuss which value of k gives the most stable output [reaches steady state first].
1
5. Consider a unity feedback control system with a plant transfer function 𝐺(𝑠) = 𝑠(𝑠+1) . You wish
to add a dynamic controller and you propose several Dynamic Controllers:
a. 𝐷(𝑠) =
𝑠+2
2
𝑠+2
b. 𝐷(𝑠) = 𝑁1 𝑠+4
𝑠+2
c. 𝐷(𝑠) = 𝑁2 𝑠+10
(𝑠+2)(𝑠+0.1)
d. 𝐷(𝑠) = 𝑁3 (𝑠+10)(𝑠+0.01)
Here, N1, N2, N3 are the 4th, 5th and 6th digits of your NSU ID respectively
Using MATLAB, simulate the step response and find the DC Gain for each controller choice. Which
controller reaches the steady state first?
 0
0