Torque and Moments
1. Torque is the rotational force applied to an object is composed of force, the
moment arm, and the respective angle between
2. The moment arm is the shortest perpendicular distance between the axis and the
action line of the force (elbow to force of bicep) whereas the lever arm is the
distance between the axis and force (shoulder to hand with weight)
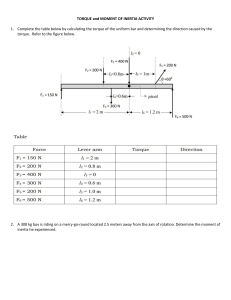
3. Torque= force ( F ) x moment arm ( r )
4. Clockwise= negative, counterclockwise= positive
5. Rotary components cause rotation of a joint and are perpendicular to bone,
non-rotary components stabilize joint via compression and are parallel to bone
6. Torque magnitude of joints in a static condition are determined by the magnitude
of the force, the length of the moment arm, and the angle of the force application
7. Torque= force ( F ) x moment arm ( r ) x angle between force and lever arm ( cos
(θ) )
8. As force angle changes, the amount of rotary and non-rotary components
change as well. The closer to 90 degrees the muscle force is, the more rotary
components are used.
9. Co-contraction increases joint stability, but reduces torque
10.Ligaments prevent excessive movement and will make a joint movement and
tendons help compress the joint, preventing movement.
11.For equilibrium to be static, there needs to be no net vertical or horizontal force,
and no net torque
12. Linear equilibrium- object remains are rest or in motion until acted upon by an
outside force
13. The sum of torques= zero
14. Identify axis, draw FBD, identify and resolve forces, solve for ΣF=0 and ΣT=0
15. Sum of all torques must equal zero
16. First class lever- motive force, axis, resistive force (MAR- elbow extension),
second class lever- axis, resistive force, motive force (ARM- push up), third class
lever- axis, motive force, resistive force (AMR-knee extension)
17.The closer the fulcrum is to the load the greater the mechanical advantage, the
closer to the effort, the greater the mechanical disadvantage
18.MA>1 means less force is needed to move a larger load, but there will be less
speed and range
19.Most are at a mechanical disadvantage because the muscles insert close to the
joints, they're 3rd class levers, and built for speed, not force
20.Longer lever arms have a higher linear velocity at the end because of a larger arc
distance traveled over the same among of time
Angular kinematics
1. Angular motion is rotation around an axis as opposed to a straight or curved path
in linear motion
2. A radian is the angle of arc length and radius. radians=degreesπ/ 180
3. Angular distance is a scalar value and is the total path traveled. Angular
displacement is the gross change in angle and is a vector quantity
4. Angular velocity is a vector and speed is a scalar as it's magnitude only, no
direction
5. An ice skater rotating faster during a tight spin
6. Linear velocity increases with distance from rotation axis (v= r x ω)
7. Linear displacement= radius x angular displacement
8. Tangential velocity is the linear velocity on one point on a rotating object
9. A ball hit closer to the end of the bat travels faster since it has a greater
tangential velocity
10.A longer lever yields a greater end velocity which leads to enhanced
performance
Angular Kinetics
1. The moment of inertia is the resistance to angular acceleration and varies based
on mass of object and how the mass is distributed from the axis
2. Greater mass increases the moment of inertia, as does a farther distance from
the axis, making things harder to rotate
3. The center of mass affects both balance and torque. If the center of mass is
closer to the base, it is more stable, and where the center of mass is located in
reference to the axis affects the amount of gravitational torque
4. Using plumb lines at different suspension points and marking where they
intersect
5. Clinical stability is based on symptoms and testing, whereas biomechanical
stability is based on joint forces and ligaments
6. Mechanical stability is increased by lowering the center of gravity, widening the
base of support, and by increasing body mass
7. A wider base of support increases stability, and a narrower base of support
increases mobility, but decreases stability
8. Lowering the center of gravity increases stability
9. In football, players lower their center of gravity to oppose torque caused, by other
players
10.1st law- a rotating body stays rotating until acted upon, 2nd law- T=I x ɑ, 3rd lawfor every torque, there is an equal and opposite torque
 0
0