y
y
y
No solution
x
x
x
One solution
Infinitely many
solutions
(coincident lines)
No solutions
(three parallel planes;
no common intersection)
No solutions
(two parallel planes;
no common intersection)
No solutions
(no common intersection)
No solutions
(two coincident planes
parallel to the third;
no common intersection)
One solution
(intersection is a point)
Infinitely many solutions
(intersection is a line)
Infinitely many solutions
(planes are all coincident;
intersection is a plane)
Infinitely many solutions
(two coincident planes;
intersection is a line)
y
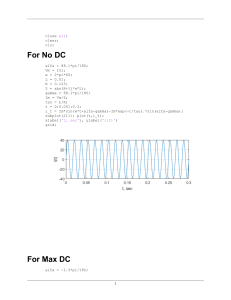
y = ax 2 + bx + c
(x3, y3)
(x1, y1)
(x2, y2)
x
0
2
2
0
4
4
2
10
5
0
6
6
7
12
5
12
28
1
Leftmost nonzero column
1
0
0
2
0
0
5
2
5
3
0
0
6
7
17
14
12
29
Leftmost nonzero column
in the submatrix
1
2
5
3
6
14
6
29
0
0
1
0
7
2
0
0
5
0
17
1
2
5
3
6
14
7
2
1
2
6
0
0
1
0
0
0
0
0
1
2
5
3
6
14
7
2
1
2
6
0
0
1
0
0
0
0
0
1
1
The first row in the submatrix was
multiplied by 1 to introduce a
2
leading 1.
–5 times the first row of the submatrix
was added to the second row of the
submatrix to introduce a zero below
the leading 1.
The top row in the submatrix was
covered, and we returned again to
Step 1.
Leftmost nonzero column
in the new submatrix
1
0
0
2
0
0
5
1
0
3
6
14
0
0
7
2
6
2
1
The first (and only) row in the new
submatrix was multiplied by 2 to
introduce a leading 1.
y
y
a1 x + b1 y = 0
x
a 2 x + b2 y = 0
Only the trivial solution
x
a1 x + b1 y = 0
and
a 2 x + b2 y = 0
Infinitely many
solutions
0
A= 2
2
0
4
4
2
10
5
0
6
6
7
12
5
12
28
1
Pivot columns
y
20
(0, 10)
(1, 7)
x
–2
6
(3, –11)
–20
(4, –14)
y
(–2, 7)
(–4, 5)
x
(4, –3)
Mon.
Tues.
Wed. Thurs.
Math
2
3
2
History
0
3
1
Language
4
1
3
Fri.
Sat.
Sun.
4
1
4
2
4
3
2
2
1
0
0
2
a11
a21
..
.
an1
a12
a22
..
.
an2
···
···
a1n
a2n
..
.
· · · ann
1
2
2
6
4
0
4
0
2
1
1
7
(2 4)
1
2
2
6
4
0
4
0
2
1
1
7
(1 3)
4
3
5
3
1
2
(6 3)
4
3
5
(2 1)
26
(0 5)
26
3
1
2
13
(4 2)
13
A
m
B
r
r
AB
m
n
n
Inside
Outside
AB =
a11
a21
..
.
ai1
..
.
a12
a22
..
.
ai2
..
.
···
···
am1
am2
···
···
a1r
a2r
..
.
air
..
.
amr
b11
b21
..
.
b12
b22
..
.
· · · b1 j
· · · b2 j
..
.
· · · b1n
· · · b2n
..
.
br 1
br 2
···
···
br j
br n
!
!
4
[1 2 4 ] 0
2
First row of A
1
1
7
4
3
5
3
1
2
[ 12 27 30 13 ]
First row of AB
A
1
2
4
1
2
4
3
7
0
3
7
0
5
8
6
5
8
6
Interchange entries that are
symmetrically positioned
about the main diagonal.
AT
1
3
5
2
7
8
4
0
6
det(A) =
a b
= ad – bc
c d
!
!
!
!
!
!
!
!
!
!
(a)
(d)
(b)
(c)
a11
0
0
0
a12
a22
0
0
a13
a23
a33
0
a14
a24
a34
a44
A general 4 × 4 upper
triangular matrix
i<j
i>j
a11
a21
a31
a41
0
a22
a32
a42
0
0
a33
a43
0
0
0
a44
A general 4 × 4 lower
triangular matrix
1
4
5
4
3
0
5
0
7
f
a
b = f(a)
Domain
A
Codomain
B
TA
x
T A(x)
Rn
Rm
T A : Rn → Rm
Rn
Rm
T A(x)
x
0
Rn
x
Rm
T A(x)
0
T A maps vectors to vectors.
T A maps points to points.
y
(x, y)
x
x
T(x)
(x, –y)
y
(–x, y)
(x, y)
T(x)
x
y
x
y=x
(y, x)
T(x)
x
(x, y)
z
(x, y, z)
x
y
x
T(x)
(x, y, –z)
z
(x, –y, z)
(x, y, z)
x
T(x)
y
x
z
T(x)
(–x, y, z)
(x, y, z)
x
x
y
x
y
(x, y)
x
(x, 0)
x
T(x)
y
(0, y)
(x, y)
T(x)
x
x
z
(x, y, z)
x
y
T(x)
x
(x, y, 0)
z
(x, 0, z)
x
(x, y, z)
y
T(x)
x
z
(0, y, z)
T(x)
(x, y, z)
x
x
y
y
T(x)
x
θ
x
(–sin θ, cos θ)
y
e2
T
(cos θ, sin θ)
θ
1
1
θ
T
e1
y
(𝑤1, 𝑤2)
w
(x, y)
θ
x
x
x
z
z
z
(x, y, z)
(z, y, x)
(y, x, z)
y
x
y
x
(x, y, z)
(x, y, z)
y
x
(x, z, y)
(a)
(b)
(c)
TA
Rn
x
TB
Rk
T A(x)
TB ° TA
Rm
T B (T A(x))
y
y
T A(x)
y=x
y=x
T B (T A(x))
x
T B (x)
x
x
x
T A(T B (x))
TB ° TA
TA ° TB
y
y
(x, y)
(x, y)
(–x, y)
x
T 1(x)
x
x
T2 (x)
T 1 (T 2 (x))
(–x, –y)
(x, –y)
T1 ° T2
x
(–x, –y)
T2 (T 1 (x))
T2 ° T1
TA
x
T A–1
Rn
T A(x)
Rn
30
35
55
15
60
30
x2
35
A
B
x3
x1
D
C
60
15
55
N
W
E
Traffic
light
200
200
x
Market St.
700
Liberty
Park
Fifth St.
500
Sixth St.
S
Chestnut St.
400
500
C
x3
400
700
D
x1
600
(a)
+ –
Switch
B
400
x2
x4
A
600
(b)
400
+ –
+ –
I2
I1
+ –
I3
+ –
Clockwise closed-loop
convention with arbitrary
direction assignments to
currents in the branches
I
+
6V–
3Ω
I1
I2
A
I3
5Ω
+ –
50 V
20 Ω
B
+ –
30 V
10 Ω
y
y = ax + b
(x2, y2)
(x1, y1)
x
y
y=x–1
(5, 4)
(2, 1)
x
y
4
3
2
1
–1
–1
x
1
2
3
4
–2
–3
–4
–5
y
1
0.5
x
0
0.25 0.5 0.75 1 1.25
p(x)
sin (πx 2/2)
50
30
400
60
750
x3
300
250
50
A
x2
x4
400
x1
40
100
x3
200
25
x5
x6
x2
300
150
x4
x1
200
B
300
200
175
500
A
200
x1
B
100
x2
x4
x3
600
x5
400
450
x6
350
x7
600
400
8V
+ –
2Ω
I1 2 Ω
I2 I3
10
9
8
7
6
5
4
3
2
1
4Ω
– +
6V
1
+ 2V
–
6Ω
I2
4Ω
I1
I3
–
1V+
2Ω
20 Ω
I4
+
10 V –
I1 20 Ω
I2 20 Ω
I5
I3
I6
20 Ω
5V
+ –
3Ω
I1
4Ω
– +
4V
I2
5Ω
– +
3V
I3
–
10 V
+
2
3
4
5
6
7
8
20 V
+ –
I2
I3
3Ω
470 Ω
I3
I1
I1
+ –
12 V
Manufacturing
Open
Sector
Utilities
Agriculture
I2
2Ω
3
M11 = 2
1
1
5
4
4
5
6 =
4
8
6
= 16
8
3
M32 = 2
1
1
5
4
4
3
6 =
2
8
4
= 26
6
a11
a21
a12
a22
a11
a21
a31
a12
a22
a32
a13
a23
a33
a11
a21
a31
a12
a22
a32
3
4
1
4
7
2
5
8
3
1
=
4
2
3
6
9
=
1
= (3)( 2)
2
1
4
7
2
5
8
3
6
9
= [45 + 84 + 96]
(1)(4) = 10
1
4
7
[105
2
5
8
48
72] = 240
C(x3, y3)
B(x2, y2)
A(x1, y1)
D
b
γ
a
α
β
c
E
F
Terminal point
Initial point
B
v
A
v = AB
Equivalent vectors
w
w
v
v+w
v
v+w
v
v+w
w+v
w
w
(a)
(b)
(c)
v
v+w
v
v+w
v
w
w
(a)
(b)
v
w
w–v
–v
(a)
–v
v
(b)
w
w–v
v
(c)
v
2v
kv
kv
v
v
(a)
(b)
1
2
v
(–1) v
(–3) v
v
u
u+v
u + (v +
w)
(u + v)
+w
v+
x
w
w
u
u
+
v
+
w
+
u+
v
x
v w
w
u
(a)
(b)
y
(c)
z
(𝑣1, 𝑣2)
(𝑣1, 𝑣2, 𝑣3)
v
v
y
x
x
y
(𝑣1, 𝑣2)
x
v+
w
y
P1(x1, y1)
OP1
v
P2 (x2, y2)
OP2
x
v = P1P2 = OP2 – OP1
y
𝑣2
𝑤2
(𝑣1 + 𝑤1, 𝑣2 + 𝑤2)
(𝑤1, 𝑤2)
v
w
+
w
y
(k𝑣1, k𝑣2)
kv
v
(𝑣1, 𝑣2)
k𝑣2
x
𝑣1
𝑤1
𝑣2
v
(𝑣1, 𝑣2)
𝑣1
k𝑣1
x
Blue
Cyan
(0, 0, 1)
(0, 1, 1)
Magenta
White
(1, 0, 1)
a.
y
z
b.
(1, 5)
a.
(1, 1, 1)
Black
Green
(0, 0, 0)
(0, 1, 0)
Red
Yellow
(1, 0, 0)
(1, 1, 0)
z
b.
y
(0, 4, 4)
(0, 0, 4)
(–3, 3)
(2, 3)
(3, 0, 4)
y
(4, 1)
x
y
x
x
(2, 3, 0)
x
y
a.
y
b.
w
v
x
u
v
x
w
u
a
f
b
e
c
d
y
(𝑣1, 𝑣2)
‖v‖
𝑣2
x
𝑣1
(a)
z
P(𝑣1, 𝑣2, 𝑣3)
‖v‖
y
O
S
Q
R
x
(b)
y
(0, 1)
j
x
i
(1, 0)
(a)
z
(0, 0, 1)
k
x
j
y
i
(1, 0, 0)
(0, 1, 0)
(b)
d
P1
d = ‖P1P2‖
P2
u
u
θ
θ
θ
v
v
v
u
v
u
The angle θ between u and v satisfies 0 ≤ θ ≤ π.
z
(0, 2, 2)
v
(0, 0, 1)
u
x
θ = 45°
y
θ
z
P(u1, u2, u3)
u
v
θ
x
Q(v1, v2, v3)
y
z
(0, 0, k)
u3
(k, k, k)
d
u2
u1
x
(k, 0, 0)
θ
y
(0, k, 0)
u+v
v
u
‖u + v‖ ≤ ‖u‖ + ‖v‖
v
w
u
d(u, v) ≤ d(u, w) + d(w, v)
u+v
v
u–v
u
z
v
d
y
u
x
z
v
k
γ
β
α
y
j
i
x
F1 + F2
F2
The single force
F1 + F2 has the
same effect as the
two forces F1 and F2.
F1
y
y
10 lb
120 N
8 lb
60°
x
45°
150 N
75°
100 N
x
y
z
(a, b, c)
P(x, y)
P(x, y, z)
(a, b)
n
n
P0(x0, y0)
P0(x0, y0, z0)
x
x
y
w2
Q
u
w1
a
(a)
Q
u
u
w2
a
w1
(b)
w2
Q
w1
(c)
a
y
e2 = (0, 1)
y
e2
L
(cos θ, sin θ)
a
sin θ
θ
cos θ
x
L
A
B
x
θ
e1 = (1, 0)
The point A has coordinates (cos2 θ, sin θ cos θ).
The point B has coordinates (sin θ cos θ, sin2 θ).
e1
y
Hθ x
L
θ
y
x
x
Hθ x
L
Pθ x
θ
x
x
u
‖u‖
a
θ
‖u‖ cos θ
π
(a) 0 <
−θ< 2
u
‖u‖
θ
a
– ‖u‖ cos θ
(b)
u+v
π
< θ<
−π
2
v
u
n = (a, b, c)
P0 (x0, y0, z0)
projn QP0
D
D
Q(x1, y1, z1)
Distance from P0 to plane.
P0
V
W
F
10 lb
50 ft
F
∥F∥
θ
∥F∥ cos θ
∥PQ∥
(
)
Work = ∥F∥ cos θ ∥PQ∥
60°
z
y
v1
x0
v
x0
v2
y
x
x
y
x – x0
x
L
x0
v
x
z
W
x
t2v2
x0
t1v1
y
x
z
y
x = x0 + tv
x0
x = x0 + t1v1 + t2v2
v2
x = t1v1 + t2v2
x0
v
x = tv
x
v1
x
y
x1
x0
v
y
7
6
5
7x + 5y = 35
4
3
2
1
x
1
2
3
4
5
6
z
(0, 0, 1)
k
j
(0, 1, 0)
i
x
(1, 0, 0)
i
k
j
y
u×v
u
θ
v
v
‖v‖
‖v‖ sin θ
u
θ
‖u‖
z
P2(–1, 0, 2)
P3(0, 4, 3)
y
x
P1(2, 2, 0)
u
w
×
v
y
z
z
(v1, v2)
(u1, u2, u3)
y
u
v
u
(u1, u2)
v
(w1, w2, w3)
w
(v1, v2, v3) y
v
x
(v1, v2, 0)
u
(u1, u2, 0)
x
(a)
x
(b)
(c)
v×w
u
w
v
h = projv × wu
c
a
z
1000 N
P
y
1m
x
2m
1m
Q
18°
200 mm
30 mm
200 N
b
E(t)
Voltage
1
t
Time
–1
y
y
y
f+g
g
g(x)
f
f(x)
f(x) + g(x)
x
x
kf
f
f(x)
x
x
(a)
f
kf (x)
(b)
f(x)
x
0
–f
–f(x)
(c)
u+v
ku
u
v
W
V
W
W
u+v
ku
v
u
(a) W is closed under addition.
u+v
v
u
W
ku
u
(b) W is closed under scalar
multiplication.
y
W
(1, 1)
x
(–1, –1)
Pn
∞
C (–∞, ∞)
C m(–∞, ∞)
C 1(–∞, ∞)
C(–∞, ∞)
F (–∞, ∞)
Natural position
m
x
0
Stretched
m
x
0
Released
m
x
0
z
z
span{v1, v2}
span{v}
kv
k1v1 + k2v2
k2v2
v2
v
y
x
(a) span{v} is the line through the
origin determined by v
v1
k1v1
y
x
(b) span{v1, v2} is the plane through the
origin determined by v1 and v2
y
2
(3, 2)
3i
+
2j
j
x
i
y
3
𝑤
(√12 , √12 )
w
45°
x
z
z
z
v2
v1
v1
v1
y
x
v2
y
v2
x
(a) Linearly dependent
y
x
(b) Linearly dependent
z
(c) Linearly independent
z
z
v1
v3
v3
v2
x
v2
y
v1
(a) Linearly dependent
v2
y
v1
x
(b) Linearly dependent
x
y
v3
(c) Linearly independent
z
z
v3
v3
v2
v1
y
v2
v1
x
x
(a)
(b)
y
z
c
y
P(a, b, c)
P(a, b)
b
y
b
x
a
O
a
x
Coordinates of P in a rectangular
coordinate system in 2-space.
Coordinates of P in a rectangular
coordinate system in 3-space.
z
c
y
P(a, b, c)
P(a, b)
b
y
b
x
a
O
a
x
Coordinates of P in a nonrectangular
coordinate system in 2-space.
Coordinates of P in a nonrectangular
coordinate system in 3-space.
cu3
bu2
u3
P(a, b)
P(a, b, c)
u2
O
u1
O
u1
au1
au1
u2
bu2
y
4
3
2
1
–3 –2 –1
–1
y
y
y
2
4
2
3
x
1
2 3
–2
–3
–4
Equal spacing
Perpendicular axes
1
x
–3 –2 –1
1
2
1
1
2 3
–3
–2
–1
–1
x
x
1
2
–3 –2 –1
3
–1
–2
–1
1 2 3
–3
–2
Unequal spacing
Perpendicular axes
–4
Equal spacing
Skew axes
–2
Unequal spacing
Skew axes
z
ck
k
(0, 0, 1)
(a, b, c)
y
j
i
x
ai
(1, 0, 0)
bj
(0, 1, 0)
A one-to-one correspondence
(v)S
v
V
Rn
y and y′
x′
j and u2
u1
x
30°
i
y
y′
45°
x and x′
The vector outside the plane
can be adjoined to the other
two without affecting their
linear independence.
Any of the vectors can
be removed, and the
remaining two will still
span the plane.
Either of the collinear
vectors can be removed,
and the remaining two
will still span the plane.
Line through the origin
(1-dimensional)
The origin
(0-dimensional)
Plane through
the origin
(2-dimensional)
R3
(3-dimensional)
Coordinate map
[ ]S
v
V
c1
c2
.
.
.
cn
Rn
Ax = b
x0
0
Ax = 0
z
Null space of A
y
x
Column space
of A
y
y
W⊥
W
W
x
x
W⊥
z
(a)
A
ll A
Nu
Row
(b)
ll
Nu
T
A
Col
A
Row Space of A
(dimension r)
Column Space of A
(dimension r)
Rm
n
R
Null Space of A
(dimension n – r)
Null Space of AT
(dimension m – r)
λx
x
x
x
x
λx
0
0
0
0
λx
λx
(a) 0 λ 1
y
6
3x
2
x
x
1
3
(b) λ 1
(c) –1 λ 0
(d) λ –1
y
L1
L2
(– 32 , 1)
(2, 2)
Multiplication
(1, 1)
by λ = 2
x
( 92 , –3)
Multiplication
by λ = –3
z = a + bi
Im(z) = b
|z|
ϕ
Re(z) = a
y
(a, b)
|λ|
ϕ
y
Scaled
x
Cx
Rotated
ϕ
x
x
y
1
y
x0 = (1, 1)
y
( 21 , 1)
(3)
(1, 1)
1
(1)
(2)
Ax0
ϕ
1
x
x
A2x0
–1
–1
A3x0
(1, )
1
2
( 54 , 12)
x
1
–1
–1
A4x0
(a)
(b)
(c)
y
(0, 1)
( 12 , 1)
Re(x)
x
Im(x)
(1, 0)
C
R
L
Channel
1
10%
Channel
2
20%
80%
Channel 1 loses 20%
and holds 80%.
Channel 2 loses 10%
and holds 90%.
90%
State at time t = k
pij
State at time
t=k+1
The entry pij is the probability
that the system is in state i at
time t = k + 1 if it is in state j
at time t = k.
0.5
Reserve
1
0.2
0.3
0.4
0.6
0.3
0.2
Reserve
2
Reserve
0.1
3
0.4
y
‖u‖ = 1
x
1
(a) The unit circle using
the standard Euclidean
inner product.
y
2
‖u‖ = 1
x
3
(b) The unit circle using
a weighted Euclidean
inner product.
y
y
1
1
x
x
3
3
4
y
1
θ
–π
–π
2
π
2
–1
π
3π
2
2π
5π
2
3π
W⊥
W
y
(–1, 3)
(1, 3)
60°
v
u
x
2
W⊥
u
0
projW u
projW ⊥ u
W
u
projv u
2
0
v2
projW u
projv u
1
v1
W
v2 = u2 – projW u2
1
u2
W1
projW u2
v1
1
v3 = u3 – projW u3
2
u3
v2
v1
W2
projW u3
2
b – Ax
b
b
Ax
Axˆ = projcol(A)b
Ax̂
col(A)
(a)
col(A)
(b)
y
W
w
1
θ
cos θ
sin θ
x
null(A)
col(A)
tion
Multiplica
x null(A)
x
M
Rn
xrow(A)
lic
ultip
row(A)
Ax
by A
n by
atio
A
null(AT )
b
bnull(AT )
bcol(A)
Rm
y
y
x
x
(a) y = a + bx
y
(b) y = a + bx + cx2
x
(c) y = a + bx + cx2 + dx3
y
(xi, yi)
di
(x1, y1)
d1
yi
y=
a+
bx
dn
(xn, yn)
a + bxi
x
5
4
3
y
2
1
0
–1
0
1
2
3
4
x
6.1
x
y
3
2
1
0
–1
0
.1 .2 .3 .4 .5
Time t (in seconds)
.6
500
450
Temperature T (K)
Distance s (in feet)
4
400
350
300
Temperature of Venusian
Atmosphere
Magellan orbit 3213
Date: 5 October 1991
Latitude: 67 N
LTST: 22:05
250
200
150
100
30 40 50 60 70 80 90 100
Altitude h (km)
Source: NASA
g
f
[
a
| f (x0) – g(x0)|
x0
]
b
g
f
f = function in C [a, b]
to be approximated
W
subspace of
approximating
functions
g = proj W f = least squares
approximation
to f from W
[
]
a
b
y
y=x
(
y = π – 2 (sin x +
y = π – 2 (sin x +
y = π – 2 sin x +
6
5
y = π – 2 sin x
4
3
y=π
2
1
x
1
2
3
4
5
6 2π 7
sin 2x
2
+ sin33x +
)
sin 2x
+ sin33x
2
sin 2x
2
)
)
sin 4x
4
v
u–v
θ
u
TA (u)
TA (v) β
v
α
0
u
y′
y
(x, y)
(x′, y′ )
Q
x′
θ
x
(a)
y′
y
u′2
sin θ
u2
θ
cos θ
u′1
x′
θ
cos θ
–sin θ
u1
(b)
z
u3
z′
u3′
y′
u′2
y
u1
x
u2
u1′
θ
x′
λ2 = 2
x = (1, 1)
( 125 , 65 )
( 65 , 53 )
(– 15 , 52)
Ax = (3, 0)
( 35 , – 56 )
λ1 = –3
First subdiagonal
Circle
Ellipse
Parabola
Hyperbola
y
y
y
y
β
β
β
β
x
–α
α
x
–α
α
x
–α
α
x
–α
α
–β
–β
–β
–β
x2
2
+
y2
2
=1
α
β
(α ≥ β > 0)
y
x
A central conic
rotated out of
standard position
x2
2
+
y2
2
=1
α
β
(β ≥ α > 0)
x2
2
–
y2
2
=1
α
β
(α > 0, β > 0)
y2
–
x2
=1
β
α2
(α > 0, β > 0)
2
y
3
x
–4
4
–3
x2
y2
+
=1
16
9
Unit eigenvector for λ2
y′
y
k/λ1
θ
k/λ2
x′
(cos θ, sin θ)
(–sin θ, cos θ)
x
Unit eigenvector for λ1
y′ y
(–
1
5
,
2
5
) (0, 2) (
2
5
,
1
5
)
(3, 0)
x′
x
26.6˚
y
y′
x′
1/ λ2
1/ λ1
x
z
y
x
Constrained
minimum
z Constrained
maximum
y
x
125
-
2
-
2
25
'
Unit circle
2
y
(x, y)
x
–3
3
–2
z
z = f (x, y)
Plane z = k
k
y
x
Level curve f (x, y) = k
y
x
‖x‖ = 1
x
xTAx = k
y
(–
1
2
2
,
1
)
5x 2 + 5y 2 + 4xy = 7
(
1
,
1
)
x +y =1
(–
1
, –
1
)
(
1
, –
π
4
1
5x 2 + 5y 2 + 4xy = 3
x
)
z
y
x
Relative minimum at (0, 0)
(a)
z
y
x
Relative maximum at (0, 0)
(b)
z
y
x
Saddle point at (0, 0)
(c)
z
x
y
y
Pure imaginary
eigenvalues
(skew-Hermitian)
|λ| = 1 (unitary)
1
x
Real eigenvalues
(Hermitian)
x + x0
x0
x
0
V
W
ke
r
(T
)
R(T )
0
z
z
(0, 0, z)
T
(x, y, z)
y
y
T
(0, 0, 0)
x
x
(a) ker(T) is the z-axis.
(x, y, 0)
(b) R(T) is the entire xy-plane.
y
T(v)
v
θ
x
Not in Range of T
V
W
V
W
V
W
Range
of T
One-to-one. Distinct
vectors in V have
distinct images in W.
Not one-to-one. There
exist distinct vectors in
V with the same image.
Onto W. Every vector in
W is the image of some
vector in V.
V
W
Range
of T
Not onto W. Not every
vector in W is the image
of some vector in V.
y
T(v)
T(u)
θ
θ
v
u
y
P
Q
M
x
x
T
w = T(v)
v
V
T –1
R(T)
T2 ° T1
T1
T2
u
U
T1(u)
V
T2 (T1(u))
W
(T3 ° T2 ° T1)(u)
T1
u
T2
T1(u)
U
T3
T3(T2(T1(u)))
T2(T1(u))
V
W
Y
A vector
in V
(n-dimensional)
A vector
in Rn
x
[x]B
T
T(x)
[T(x)]B′
A vector
in W
(m-dimensional)
A vector
in Rm
T maps
V into W
x
T
T(x)
x
Direct
computation
(1)
[x]B
A
[T(x)]B′
(3)
Multiply by A
[x]B
(2)
Multiplication by A maps Rn into Rm
(a)
T(x)
(b)
[T(x)]B′
[T]B′,B
Basis for the
image space
Basis for the
domain
[T]B′,B [x]B = [T(x)]B′
Cancellation
x
Direct
computation
(1)
[x]B
T(x)
(3)
Multiply by [T]B′,B
(2)
[T(x)]B′
!
!
!
[T2° T1]B′,B = [T2]B′,B″ [T1]B″,B
Cancellation
T1
Basis B
T2
Basis B″
T3
Basis B‴
Basis B′
x
Direct
computation
(1)
T(x)
(3)
[x]B
Multiply by [T]B′,B
(2)
[T(x)]B′
I
T
v
V
Basis = B′
I
v
V
Basis = B
T(v)
V
Basis = B
T(v)
V
Basis = B′
[T]B′ = PB→B′ [T]B PB′→B
Exterior subscripts
ARTHUR SASSE/AFP/Getty Images
Digitized scan
y
y
e2
3
4
4
x
1
2
1
2
4
x
Unit square rotated
1
3
x
x
1
e1
Unit square
3
2
(1, 1)
2
y
y
3
Unit square reflected
about the y-axis
4
Unit square reflected
about the line y = x
y
3
(0, 1)
(1, 1)
4
2
1
(0, 0)
x
(1, 0)
y
(1, 3)
2
(0, 2)
3
1
(1, 1)
4
(0, 0)
x
y
y
3 (1, 1)
4
2
x
x
1
1
4
2
3 (1, –1)
y
y
3 (1, 1)
4
2
(–1, 1) 3
x
2
4
1
y
y
y=x
3
y=x
2
(1, 1)
2
4
x
1
x
(1, 1)
3
1
1
x
4
y
y
(1, 1)
(1, 0)
x
y
x
y
(1, 1)
(0, 1)
x
x
(cos θ – sin θ, sin θ + cos θ)
y
y
(1, 1)
x
θ
x
y
y
(k, 1)
(1, 1)
x
x
y
y
(1, k)
(1, 1)
x
x
y
y
(k, 1)
(1, 1)
x
x
y
y
(1, 1)
(1, k)
x
x
y
(k, 1)
y
(1, 1)
(1 + k, 1)
x
x
y
(k, 1)
(1, 1)
y
(k + 1, 1)
x
x
y
y
(1, 1 + k)
(1, 1)
(1, k)
x
x
y
y
(1, 1)
(1, 1 + k)
x
x
(1, k)
y
y
(1, 1)
y
y =x
(3, 1)
(1, 1)
x
x
x
Reflection
about y = x
y
y
Shear in the
x-direction by a
factor k = 2
y
y =x
(1, 3)
y =x
(3, 1)
(1, 1)
x
x
Shear in the
x-direction by a
factor k = 2
x
x
0<k<1
Reflection
about y = x
T(x) = kx
T(x) = kx
k>1
x
(0, 1)
(0, k)
(1, 0)
(0, k)
(0, 1)
(1, 0)
y
(1, 1)
x
(–1, –1)
(k, 0)
(k, 0)
y
(1, 1)
x
(–1, –1)
!
!
!
y
y
y
y
y =x
(1, 3)
y =x
(0, 2)
(3, 1)
( 32 , 1)
(1, 1)
x
(1, 1)
x
x
x
(0, 0)
z
z
x
θ
w
(a) Angle of rotation
Negative
rotation
u
u
y
y
x
x
z
Positive
rotation
Axis of rotation
l
y
x
(b) Right-hand rule
z
Yaw
y
x
Pitch
Roll
z
y
w
x
θ
x
z
x
y
θ
x
w
z
θ
x
w
y
x
y
1
(0, .90)
x
1
(.45, 0) (.55, 0)
z
z
(x, y, z)
(x + kz, y + kz , z)
y
x
y
x
Solve Ax = b
x
b
Solv
e Ux =
y
y
Solve L
y=b
Reduction to
Row Echelon Form
2
–3
4
Row Operation
1
2
Step 1.
3
–8
9
× row 1
(3 × row 1) + row 2
3
1
9
(−4 × row 1) + row 3
3
1
–3
(3 × row 2) + row 3
3
1
0
1
7
3
1
0
1 0 0
E2 = 3 1 0
0 0 1
1 0 0
E 2–1 = –3 1 0
0 0 1
E3 =
1 0 0
0 1 0
–4 0 1
1 0 0
E 3–1 = 0 1 0
4 0 1
1 0 0
E4 = 0 1 0
0 3 1
1 0
E 4–1 = 0 1
0 –3
1 0 0
E5 = 0 1 0
1
0 0 7
1 0 0
E 5–1 = 0 1 0
0 0 7
1
3
7
Step 5.
1
0
0
2 0 0
E 1–1 = 0 1 0
0 0 1
1
3
–2
Step 4.
1
0
0
0 0
E1 = 0 1 0
0 0 1
1
3
2
Step 3.
1
0
0
1
2
1
0
2
Step 2.
1
0
4
Inverse of the
Elementary Matrix
2
0
2
6
–8
9
1
–3
4
Elementary Matrix
Corresponding to
the Row Operation
1
3
1
=U
× row 3
0
0
1
!
!
!
!
!
!
!
!
!
5°
0°
0°
5°
5°
T1
T3
T5
T2
T4
T6
20°
20°
20°
10°
10°
λ1v0 + λ2w0
Eigenspace λ2
x0
w0
x0
λ2w0
v0
(a)
Eigenspace λ2
Eigenspace λ1
w0
x1
x0
λ1v0
x1
x
v0
(b)
Eigenspace λ1
(c)
Main diagonals
Original
Reconstruction
Rank 4
Rank 10
Rank 20
Rank 50
Rank 128
Image: Digital Vision/
Age Fotostock America, Inc.
H
D
C
A
A
B
B is shaded.
A
A
B
B is shaded.
Theorem 1A
y
b
a + bi
y
a + bi
b
b
Real axis
a
(Real part of z)
x
x
a
a
y
y
z1
(Imaginary
part of z)
Theorem 1A
Imaginary axis
z = a + bi
z1
z1 + z2
z2
The sum of two
complex numbers
x
z1 – z2
z2
The difference of two
complex numbers
x
y
(a, b)
z = a + bi
x
z = a – bi
(a, –b)
z = a + bi
|z|
b
a
z = a2 + b2
(a, b)
|z|
b = |z| sin ϕ
ϕ
a = z cos ϕ
1
π
3
2
√3
(1, – 3)
z1z2
y
z2
z1
|z2|
|z1‖z2|
ϕ2
|z1|
ϕ1
x
ϕ1 + ϕ2
y
iz
z
90°
x
50
40
10
30
60
50
10
40
4
3
t=2
t=
1
y
2
–1
t=
2
t=–
–2 –1
1
x
∅
∅
y
4
x
–2
2
–4
y
u2
q2
q1
u1
x
y
y
x
7
12
x
1
2
–50
45678
y
y
5x 2 – y 2 = 5
x
(–1, 0)
(0, 1)
5x 2 – y 2 = –1
x
(1, 0)
(0, –1)
y
2
p(x) = 2 + x
x
y
(0, 1)
y
(3, 1)
(1, 1)
3
1
2
4
(0, 0)
x
(0, 0)
x
(1, 0)
1
2
4
(2, –1)
3
(–1, –2)
y
y
(– 12 , 32 )
( 12 , 1)
(1, 1)
x
(0, 0)
x
(0, 0)
(1, 0)
y
(0, 1)
y
( 14, 1 )
(1, 1)
1
( 54, 1 )
1
x
1
x
1
WILEY END USER LICENSE AGREEMENT
Go to www.wiley.com/go/eula to access Wiley’s ebook EULA.